7.1 rcpspの構成要素
資源制約付きスケジューリング問題ソルバrcpspを利用する際には,必ず次の3つの構成要素Activity, ResourceRequire, ResourceCapacityを定義しなければなりません.この3つの構成要素の関係を表すと,以下のような図になります.
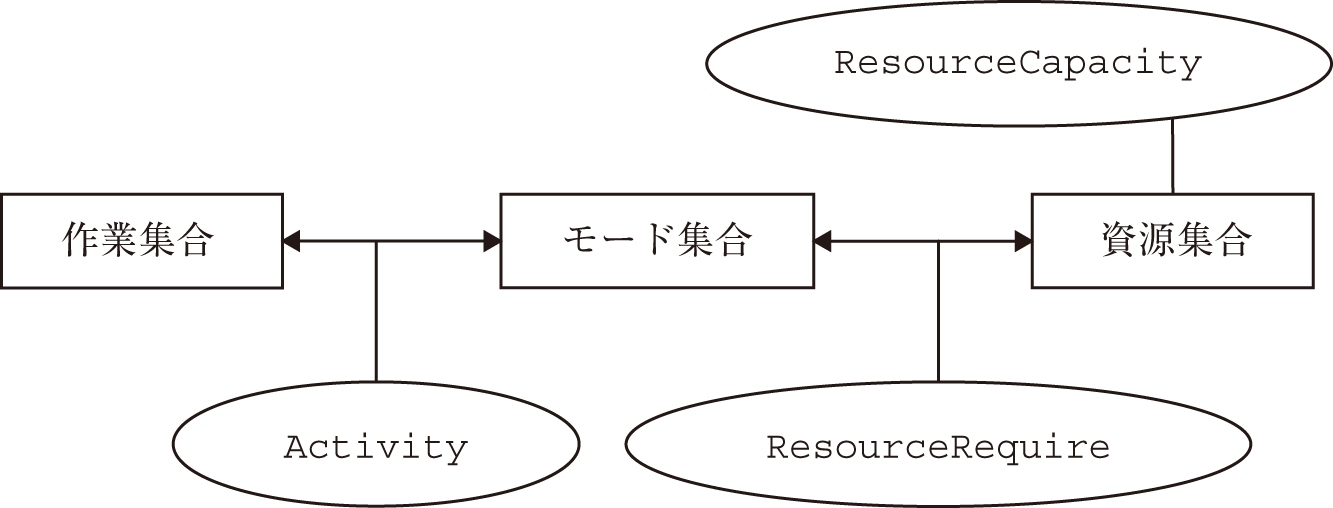
作業集合は,「必ず実施しなければならない作業」から構成される集合です.作業集合の要素には,実施する必要の無い作業が含まれてはいけません.モード集合は,「作業に対する対処方法」から構成される集合です.「作業に対する対処方法」の事を,rcpspではモードと呼びます.資源集合は,「モードの利用に必要な資源」から構成される集合です.rcpspを利用する際には,まずこの3種類の集合を定義する必要があります.
次に,「どの作業をどのモードで処理するか」に相当する変数Activityを定義します.rcpspが決定するのは,このActivityの値です.さらに,「各モードはどの資源をどの程度必要とするか」に相当する定数ResourceRequireを定めます.最後に,「資源はどれだけ利用できるか」に相当する定数ResourceCapacityを定めます.
なお,rcpspでは完了時刻最小化問題と,納期遅れ最小化問題を扱うことができます.どちらを扱うかは,目的関数で指定します.
rcpspで利用することのできる構成要素は以下の通りです.
| 構成要素名 | C++SIMPLE内の名称 | 機能 |
|---|---|---|
| 目的関数 | Objective |
目的関数を表す |
| 制約式 | Constraint |
制約式を表す |
| 定数 | Parameter |
定数を表す |
| 範囲演算関数 | sum |
|
| 式 | Expression |
頻出する数式に対して,簡単な別の表現を与える |
| 添字 | Element |
添字を表す |
| 集合 | Set |
添字の動く範囲を表す |
| 順序集合 | OrderedSet |
要素間に順序を持つ集合を表す |
| 数列集合 | Sequence |
等差数列からなる集合を表す |
| 条件式 | 制約式や代入文を制限する | |
| ソフト制約関数 | softConstraint |
ソフト制約を表す |
| アクティビティ | Activity |
必要な作業がどのモードを用いるかという変数 |
| 必要資源 | ResourceRequire |
モードの利用に必要な資源を表す |
| 資源供給量 | ResourceCapacity |
利用可能な資源の限界値を表す |
| モード順序関数 | modeOrder |
モード順序を同一に設定する |
| アクティビティ固定関数 | fixActivity |
アクティビティを固定する |
| アクティビティ固定解除関数 | unfixActivity |
アクティビティの固定を解除する |
以降,rcpspでのみ利用可能な構成要素,あるいはrcpspで用いる場合に注意を要する構成要素に関してのみ説明します.
上に戻る